

It might be good if I can get audio signals from IC-7410 in my rig control program. I used to use APIs provided by JACK, but this time I am trying with ALSA.
This could be a starting point for a beginner, so let’s see an example, pcm.c.
/*
* Transfer method - asynchronous notification
*/
struct async_private_data {
signed short *samples;
snd_pcm_channel_area_t *areas;
double phase;
};
static void async_callback(snd_async_handler_t *ahandler)
{
snd_pcm_t *handle = snd_async_handler_get_pcm(ahandler);
struct async_private_data *data = snd_async_handler_get_callback_private(ahandler);
signed short *samples = data->samples;
snd_pcm_channel_area_t *areas = data->areas;
snd_pcm_sframes_t avail;
int err;
avail = snd_pcm_avail_update(handle);
while (avail >= period_size) {
generate_sine(areas, 0, period_size, &data->phase);
err = snd_pcm_writei(handle, samples, period_size);
if (err < 0) {
printf("Write error: %s\n", snd_strerror(err));
exit(EXIT_FAILURE);
}
if (err != period_size) {
printf("Write error: written %i expected %li\n", err, period_size);
exit(EXIT_FAILURE);
}
avail = snd_pcm_avail_update(handle);
}
}
static int async_loop(snd_pcm_t *handle,
signed short *samples,
snd_pcm_channel_area_t *areas)
{
struct async_private_data data;
snd_async_handler_t *ahandler;
int err, count;
data.samples = samples;
data.areas = areas;
data.phase = 0;
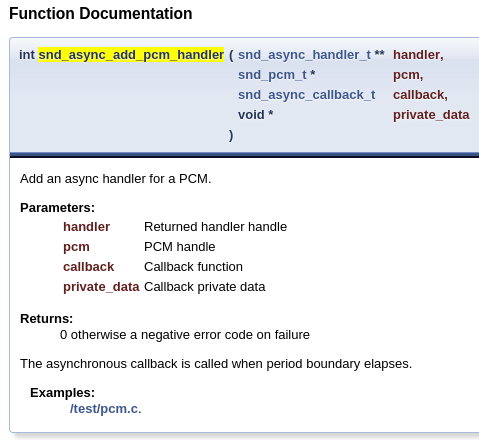
err = snd_async_add_pcm_handler(&ahandler, handle, async_callback, &data);
if (err < 0) {
printf("Unable to register async handler\n");
exit(EXIT_FAILURE);
}
for (count = 0; count < 2; count++) {
generate_sine(areas, 0, period_size, &data.phase);
err = snd_pcm_writei(handle, samples, period_size);
if (err < 0) {
printf("Initial write error: %s\n", snd_strerror(err));
exit(EXIT_FAILURE);
}
if (err != period_size) {
printf("Initial write error: written %i expected %li\n", err, period_size);
exit(EXIT_FAILURE);
}
}
if (snd_pcm_state(handle) == SND_PCM_STATE_PREPARED) {
err = snd_pcm_start(handle);
if (err < 0) {
printf("Start error: %s\n", snd_strerror(err));
exit(EXIT_FAILURE);
}
}
/* because all other work is done in the signal handler,
suspend the process */
while (1) {
sleep(1);
}
}
Looks reasonable, isn’t it? So shall we begin?