
Now the callback function is modified to include the lines for sending a command that relates to the button clicked.
void callback( GtkWidget *widget, gpointer data ) {
static char output[128];
int outputcount;
static char command_cw [7] = {0xfe, 0xfe, 0x80, 0xe0, 0x06, 0x03, 0xfd}; /* set mode to CW */
static char command_cw-rev[7] = {0xfe, 0xfe, 0x80, 0xe0, 0x06, 0x07, 0xfd}; /* set mode to CW-REV */
if(g_strcmp0((char *) data, "CW") == 0) {
outputcount = 7; /* command length */
write(fd, &command_cw, outputcount);
}
if(g_strcmp0((char *) data, "CW-REV") == 0) {
outputcount = 7; /* command length */
write(fd, &command_cw-rev, outputcount);
}
}
The above code is not complete, but you can see what I am trying to do.
#define MYRIG "/dev/ttyUSB0"
#define BAUDRATE B19200
void serial_init(void) {
struct termios tio;
memset(&tio, 0, sizeof(tio));
tio.c_cflag = CS8 | CLOCAL | CREAD;
tio.c_cc[VTIME] = 0;
tio.c_cc[VEOL ] = 0xfd; /* IC-7410 postamble */
tio.c_lflag = ICANON;
tio.c_iflag = IGNPAR | ICRNL;
cfsetispeed(&tio, BAUDRATE);
cfsetospeed(&tio, BAUDRATE);
tcsetattr (fd, TCSANOW, &tio);
}
/* main() */
fd = open(MYRIG, O_RDWR | O_NOCTTY);
serial_init();
You also need to add the above lines before talking to IC-7410. Lines for error check are omitted for clarity. See CW Keyboard (2) for an complete example.
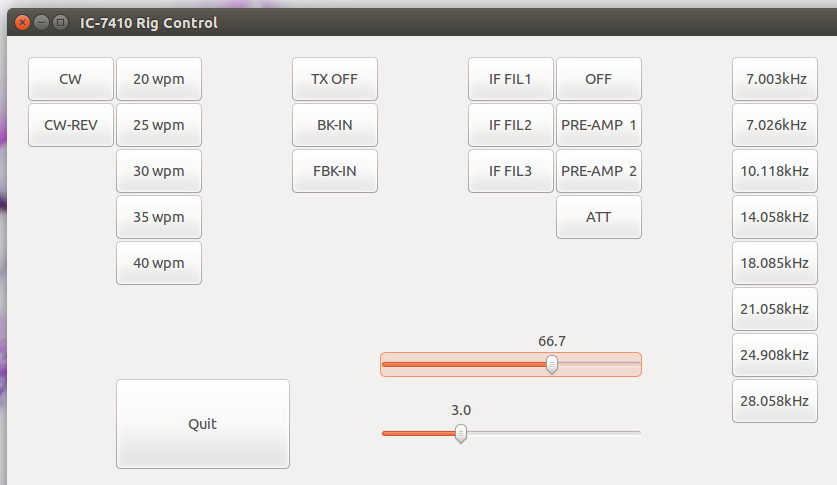
Some scale widgets are added.