
Apart from the mechanical stability, we must also be concerned with numerical stability.
This is especially true in our case, because, right now, a simple Euler method is employed in integrating the quaternion that represent the rotation of the body.
Quaterniond qq(0.0, omega.x()/2.0, omega.y()/2.0, omega.z()/2.0);
qdot = qq * q;
q.w() += qdot.w() * dt;
q.vec() += qdot.vec() * dt;
q.normalize();
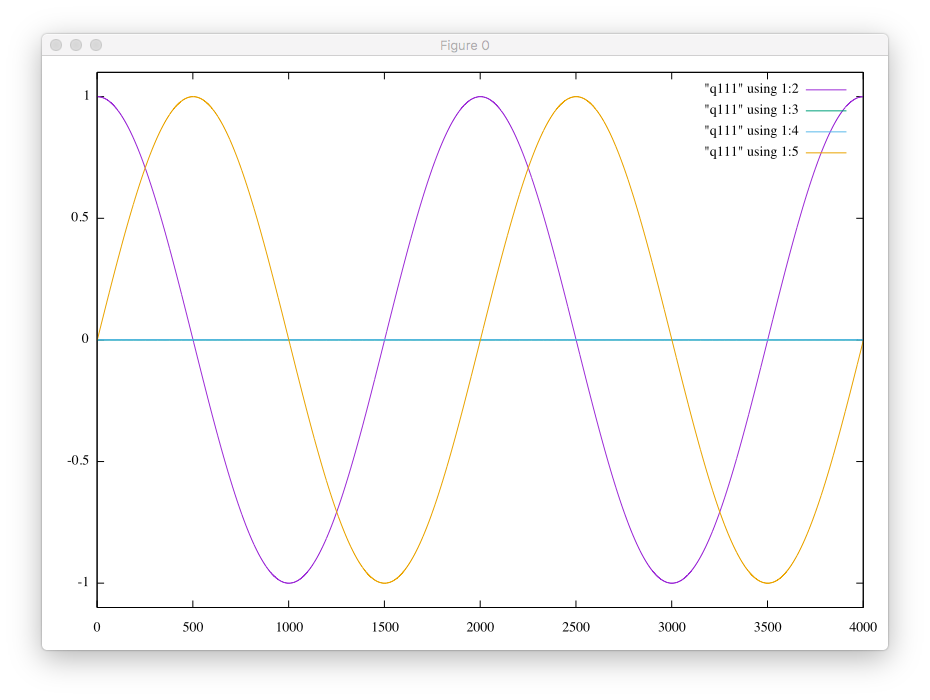
The figure shows the time evolution of the four components of the quaternion, q with the initial conditions of:
Ibody << 1.0,0.0,0.0, 0.0,1.0,0.0, 0.0,0.0,1.0;
Quaterniond q(AngleAxisd(M_PI*0.0, Vector3d::UnitX()));
q.normalize();
L << 0.00, 0.00, 2.0*M_PI;
Numerically, they are:
double dt = 0.001;
for(double t=0; t<4.0; t+= dt) {
1 1 0 0 0
2 0.999995 0 0 0.00314158
3 0.99998 0 0 0.00628312
3999 0.99998 0 0 -0.00632446
4000 0.999995 0 0 -0.00318292
4001 1 0 0 -4.13415e-05
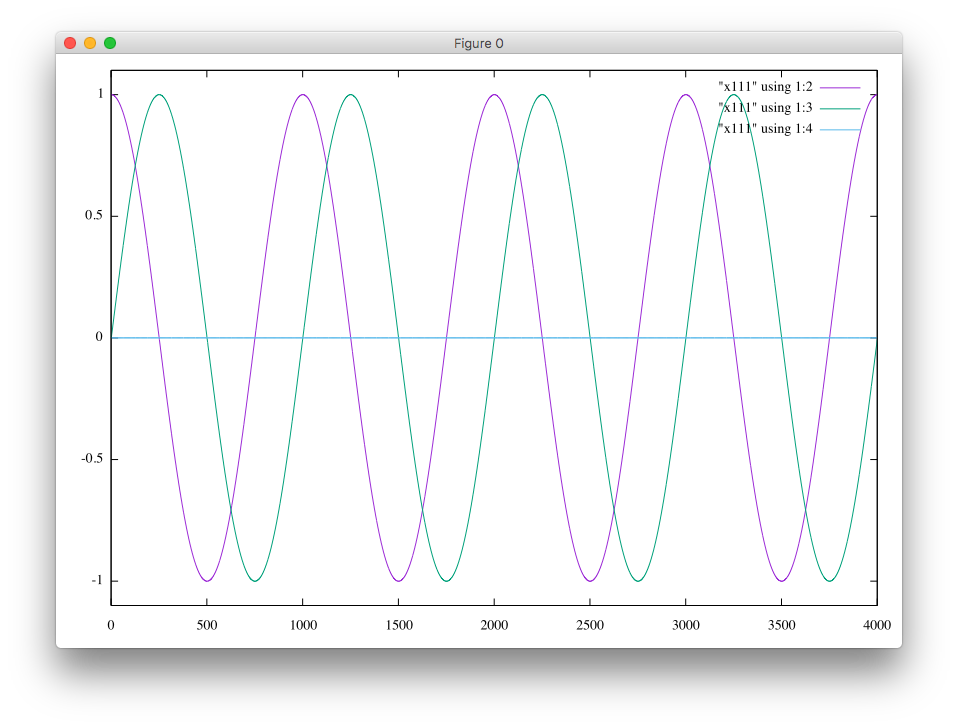
Note that the quaternion, q, rotates only once in two seconds, while the unit X vector, fixed to the body, rotates once in very second.
Now, we do 40sec simulation instead of 4sec.
double dt = 0.001;
for(double t=0; t<40.0; t+= dt) {
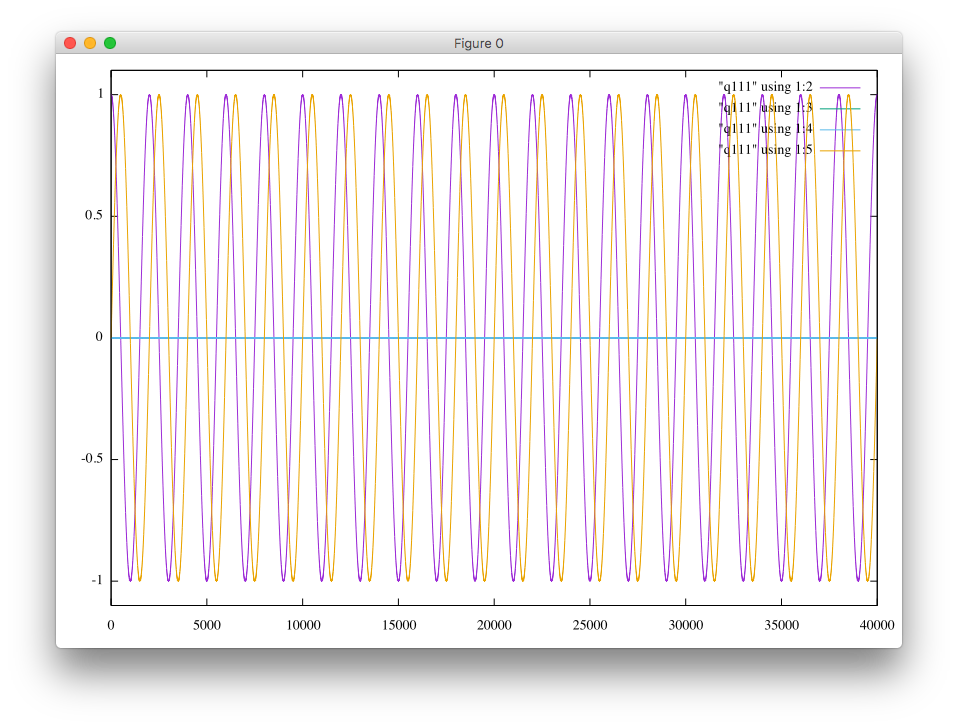
So can we say that it is reasonably stable?