

力学的安定性に加えて、私たちは、数値的安定性についても考慮する必要があります。
これは、私たちのケースでは特に真実です。なぜならば、今は、単純なオイラー法を用いて、回転を表現する四元数の積分を行っているからです。
Quaterniond qq(0.0, omega.x()/2.0, omega.y()/2.0, omega.z()/2.0);
qdot = qq * q;
q.w() += qdot.w() * dt;
q.vec() += qdot.vec() * dt;
q.normalize();
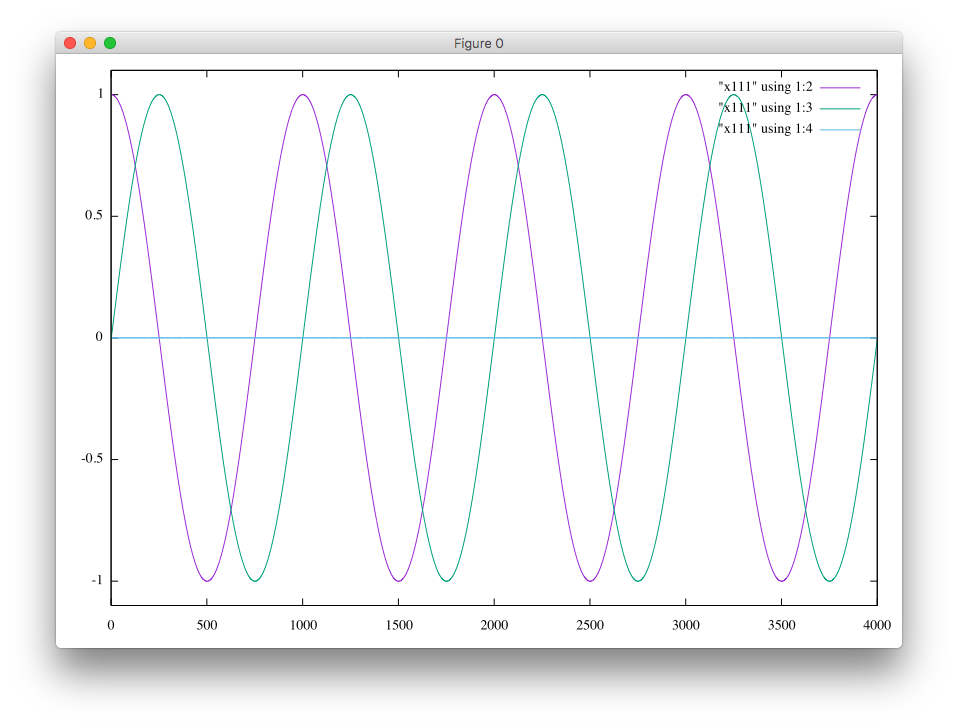
図は、四元数qの成分の時間的発展を示しています。初期条件は:
Ibody << 1.0,0.0,0.0, 0.0,1.0,0.0, 0.0,0.0,1.0;
Quaterniond q(AngleAxisd(M_PI*0.0, Vector3d::UnitX()));
q.normalize();
L << 0.00, 0.00, 2.0*M_PI;
数値的には、以下のようになります:
double dt = 0.001;
for(double t=0; t<4.0; t+= dt) {
1 1 0 0 0
2 0.999995 0 0 0.00314158
3 0.99998 0 0 0.00628312
3999 0.99998 0 0 -0.00632446
4000 0.999995 0 0 -0.00318292
4001 1 0 0 -4.13415e-05
四元数qは、2秒間で1回転しかしないことに注意して下さい。これに対して、物体に固定した単位Xベクトルは、1秒で1回転します。
さて、4秒間ではなく40秒間のシミュレーションをやってみましょう。
double dt = 0.001;
for(double t=0; t<40.0; t+= dt) {

まあ、それらしいと言えますかね。