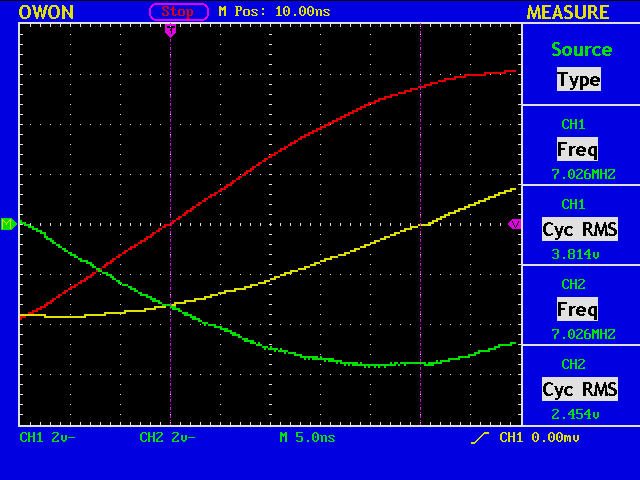
さて、私のダイポールアンテナのインピーダンスを測定してみましょう。この図では、基準信号が赤色で、アンテナに加わる信号が黄色で表示されています。もしも、ダイポールアンテナのインピーダンスが正確に50オームであれば、2つの信号は同じになるはずです。
% head -15 owondata.txt
Save Time: 2016-09-11 13:27:26
Units:(mV)
CH1 CH2
Frequency: 7.026 MHz 7.042 MHz
Period: 0.142 uS 0.142 uS
SP: 0.001 uS 0.001 uS
PK-PK: 4.080 V 3.200 V
1 0.000 1760.00 1560.00
2 0.001 1760.00 1560.00
3 0.001 1720.00 1560.00
4 0.002 1720.00 1560.00
オシロスコープ、OWON PDS 5022S、から得られたテキストファイルは、ROOTのプログラムで処理される前に、AWKの1行プログラムで加工されます。
% cat owondata.txt | awk 'NR>8 {print $1, $3}' >owondata_ch1.txt
% cat owondata.txt | awk 'NR>8 {print $1, $4}' >owondata_ch2.txt
// file name = mytest5.cc
{
TGraph *g = new TGraph("owondata_ch1.dat");
g->SetMarkerStyle( 20 );
g->SetMarkerSize( 0.5 );
g->Draw("AP");
TF1 *f1 = new TF1("f1", "[0]*sin([1]*x+[2])+[3]");
f1->SetParameter(0, 2000.0);
f1->SetParameter(1, 0.022);
f1->SetParameter(2, 0.0);
f1->SetParameter(3, 0.0);
f1->SetLineColor(kRed);
g->Fit(f1);
TGraph *h = new TGraph("owondata_ch2.dat");
h->SetMarkerStyle( 24 );
h->SetMarkerSize( 0.5 );
h->Draw("P");
TF1 *f2 = new TF1("f2", "[0]*sin([1]*x+[2])+[3]");
f2->SetParameter(0, 2000.0);
f2->SetParameter(1, 0.022);
f2->SetParameter(2, 0.0);
f2->SetParameter(3, 0.0);
f2->SetLineColor(kYellow);
h->Fit(f2);
}

% root mytest5.cc **************************************** Minimizer is Minuit / Migrad Chi2 = 536853 NDf = 996 Edm = 7.63442e-09 NCalls = 148 p0 = 2001.67 +/- 1.04511 p1 = 0.0220756 +/- 1.82267e-06 p2 = 2.03624 +/- 0.00102561 p3 = -12.2567 +/- 0.749788 **************************************** Minimizer is Minuit / Migrad Chi2 = 459226 NDf = 996 Edm = 8.91283e-08 NCalls = 128 p0 = 1558.13 +/- 0.960465 p1 = 0.0220847 +/- 2.15852e-06 p2 = 1.50439 +/- 0.00124773 p3 = -14.2113 +/- 0.68435
パラメータp0とp2が、振幅と位相です。従って、振幅の比は1558.13/2001.67=0.778415、位相差は1.50439-2.03624=-0.531850[rad]=-30.4728[deg]です。